南海科创平台
佛山智能装备技术研究院
在蛇年伊始迎来了“开门红”
其机器人动力学研究取得了世界级突破!
近日,佛山智能装备技术研究院(以下简称“智能装备院”)收到国际期刊IEEE Transactions on Robotics(简称IEEE T-RO)发来的贺信,祝贺其研究成果“An Analytical Approach for Dealing with Explicit Physical Constraints in Excitation Optimization Problems of Dynamic Identification”被正式录用。
该研究由智能装备院关键技术实验室创新团队牵头,实验室主任黄石峰博士为第一完成人,香港科技大学机械及航空航天工程学系段默龙教授为通讯作者,智能装备院常务副院长周星、英国埃克塞特大学计算机科学学院计算智能领域青年专家李帆博士为共同完成人。
IEEE T-RO与Science Robotics(Science子刊)、International Journal of Robotics Research为机器人领域公认的三大顶级期刊,在国际上享有极高盛誉。IEEE T-RO刊发的研究成果代表着机器人学领域的基础研究重大进步,最先进研究的重磅突破,要求理论和工程实践上同时推动机器人学的重要发展。
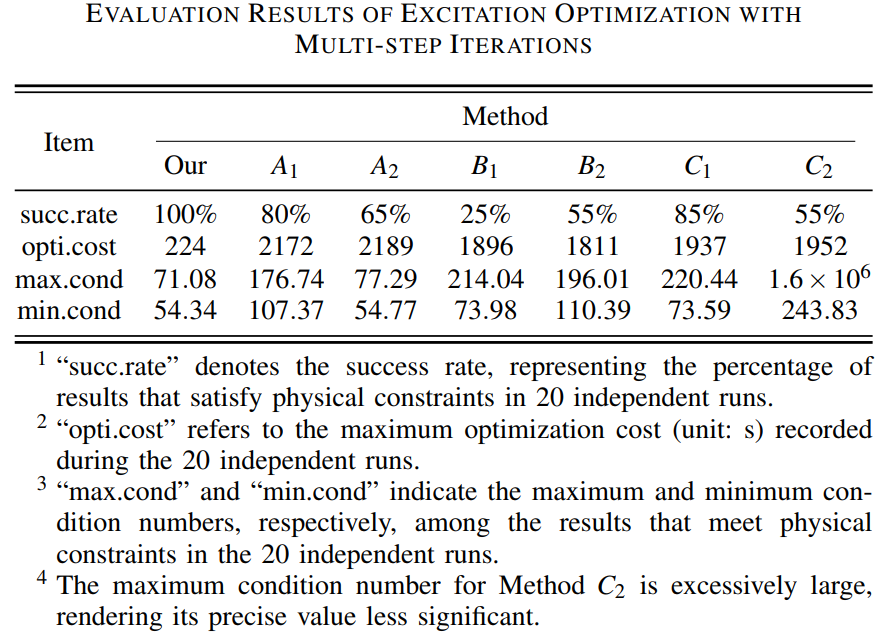
智能装备院本次在IEEE T-RO录用的学术长文(regular paper)彻底突破了长期困扰机器人领域在动力学参数辨识方面生成最优性激励轨迹所面临的两大共识性难题:1)低成功率;2)高耗时。
合适的激励轨迹是机器人动力学参数辨识准确性的先决条件。激励轨迹的优化问题在机器人领域被处理成一种带约束优化的标准范式,需借助启发式智能优化或基于梯度的数值求解器以迭代的方式对最优解进行搜索,而多关节机器人的物理约束条件使得可行解(即物理可执行的激励轨迹)的搜索变得异常困难。换言之,在有限迭代步内发现可行解成了一个极具不确定的概率性问题。统计意义下,可行解计算成功率难达90%,耗时往往长达数小时。因此,业内对激励轨迹的优化仅局限于离线任务中,如机器人本体动力学模型的参数辨识。所述缺陷是机器人领域学术界和工业界从业者们的共识,也直接造成在对于时间有严格限制的负载辨识任务中无法在线生成最优激励轨迹,最终导致负载模型的辨识精度不高。调研发现,包括国际一线品牌机器人都面临此类挑战。
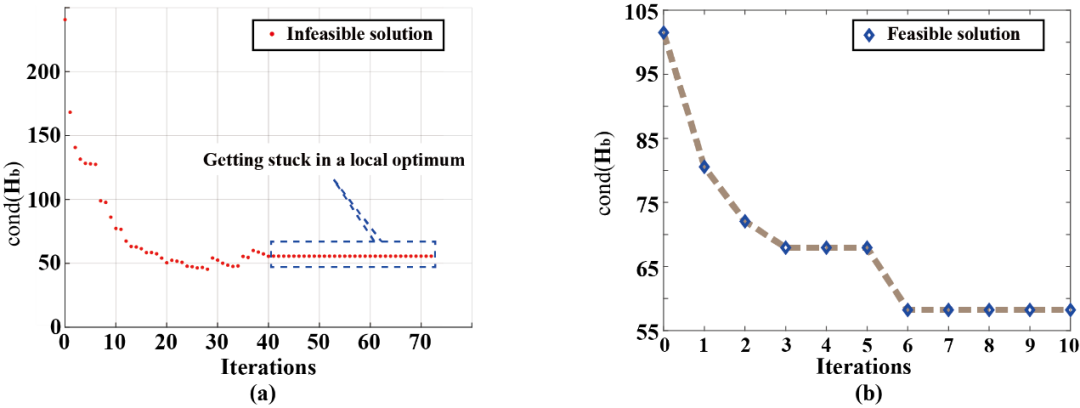
智能装备院提出了一种处理激励优化问题中物理约束的解析方法,将可行解的求解从不确定的迭代搜索范式转变为了确定性计算范式,从而使得优化过程中所有候选解都是物理可执行的,首次实现了100%的成功率,同时可以在较短时间内生成满足最优性准则的持续性激励轨迹。对于离线类本体辨识任务,激励优化耗时仅需数百秒;对于负载辨识任务,激励优化在数秒内完成。因此,无论是在成功率还是在优化耗时方面,相较于现阶段激励优化技术都具有压倒性优势。
最优性指标收敛曲线及可行解搜索情况:(a)对比方发;(b)本文方法。
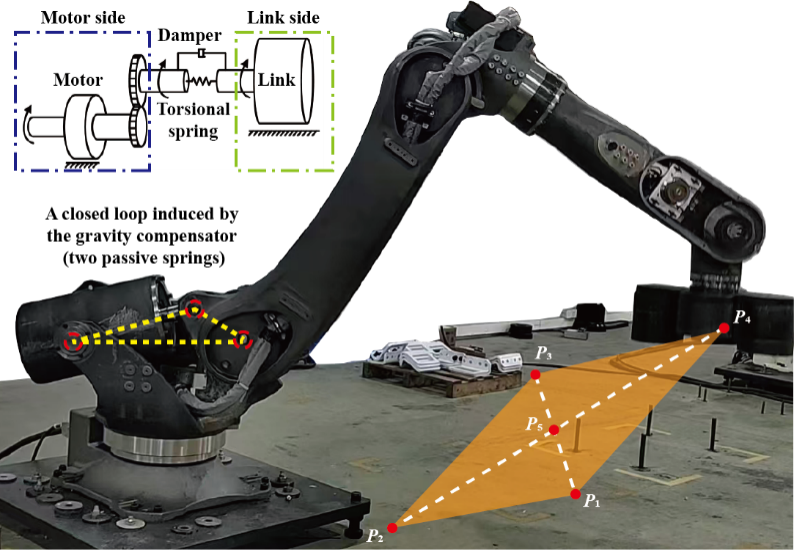
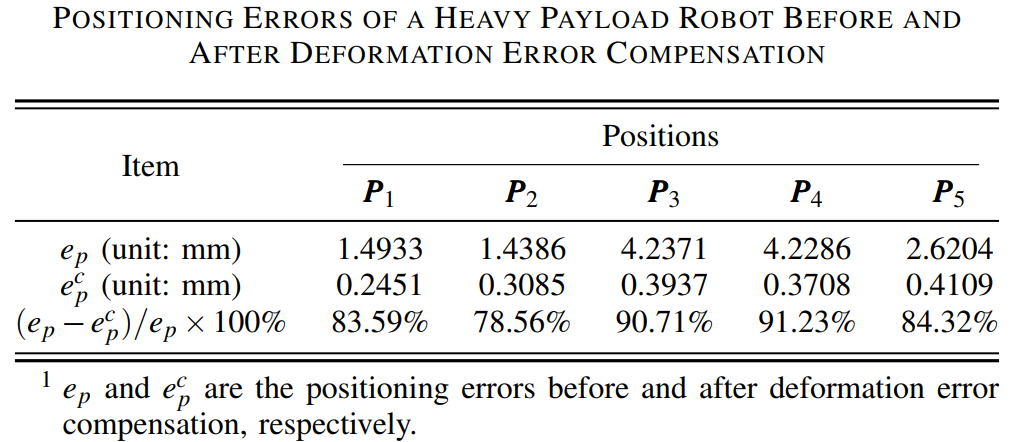
成果已在华数机器人最新一代产品上实现批量应用,实现了负载质量最大估计误差不超过 0.1 ∼ 0.2kg,质量误差百分比在 0.25% ∼ 3.50% 以内的高精度辨识,且突破了负载辨识激励运动受制于构型的技术瓶颈。成果应用在华数机器人的210公斤大负载机器人“柔性误差补偿技术”上,绝对定位精度有效提升高达91.23%,全工作空间的定位精度波动控制在0.2mm以内,跻身国际领先水平。
该项研究成果得到了国家重点研发计划青年科学家项目智能机器人专项“机器人刚柔耦合动力学建模与高精度辨识”,香港科技大学与香港科技大学(广州)“1+1+1”联合资助的校际合作研究计划,以及香港科技大学前沿技术研究计划的共同支持。
该研究成果是世界级的突破,对于机器人领域的动力学研究有着极大的推导作用,同时具有广阔的产业化应用前景。该成果所突破的激励优化“低成功率”与“高耗时”挑战,将直接提升机器人制造商在机器人出厂阶段实施动力学模型配置时的效率,对于量产产能的提升是质的影响;其高可靠性(100%成功率)和低耗时(数秒级)的卓越表现,也将积极促进负载动力学模型在应用现场环境下的部署效率,颠覆传统技术模式下对负载辩识无法实现在线激励优化的不足,提高机器人的生产节拍、加工精度、交互柔顺性等关键性能。该成果属于机器人核心领域基座型技术的突破,对于智能工业机器人、人形机器人等都具有广泛的应用面和普适性产业化价值,也为具身智能框架下的动力学融合建模高质量数据高效收集提供了底层的技术支撑。
 智汇+首页
智汇+首页