美国制造工程师协会(SME)视觉分会和美国机器人工业协会(RIA)自动化视觉分会对机器视觉的定义为:是通过光学装置和非接触式的传感器,自动的接受和处理一个真实物体的图像,以获得所需信息或用于控制机器人/机械运动的装置。
机器视觉最早被提出来是在20世纪60年代,直到20世纪80到90年代,机器视觉才迎来了蓬勃发展,而在21世纪之后,机器视觉技术才步入成熟期。
有公开数据显示,在2018年,全球用于工业自动化领域的机器视觉技术市场规模达44.4亿美元,预计2023年将达122.9亿美元,其年复合增长率高达21%。
相较于全球机器视觉行业而言,中国的机器视觉相关产业起步较晚,但发展速度很快。自2011年到2019年,我国机器视觉市场从10亿元跃升到百亿级,每年都维持着两位数的增速。目前,中国已成为仅次于美国和日本的世界第三大机器视觉市场。
而2020年新冠疫情的爆发,虽然对整个行业有一定的冲击影响,但却成为了机器视觉最大的“练兵场””——无人机喷洒消毒、机器人无接触式配送等,加速了大众对机器人的认知,长期来看,这无疑会加速机器视觉行业的发展进程,各行各业将会对机器视觉的功能特性运用更加多元化,助推行业的全面升级。
从目前的行业发展来看,机器视觉在功能上的应用主要表现在四个方面:
一、导航和定位
对于人眼而言,导航和定位,实则就是通过双眼来目标物体的判定相对位置和绝对位置。于机器而言,则需为其造一双“眼睛”——3D视觉来实现的。
谈到3D视觉,首先说说3D视觉的测量原理。目前市场上主流的有四种3D视觉测量技术:双目视觉、TOF、结构光和激光三角测量。
1、双目技术,是目前较为广泛的3D视觉系统,它的原理就像我们人的两只眼睛,用两个视点观察同一景物,以获取在不同视角下的感知图像,然后通过三角测量原理计算图像的视差,来获取景物的三维信息 。
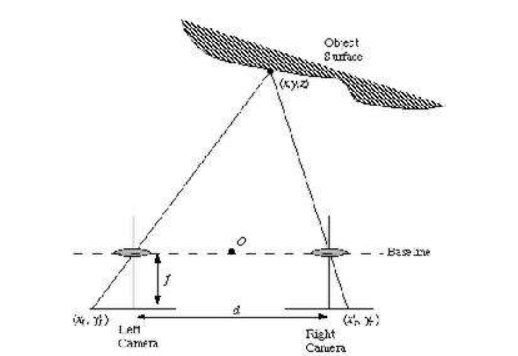
双目视觉对于硬件要求低,因而能一定程度上控制成本。但它对于环境光照非常敏感,光照角度变化、光照强度变化等环境因素的影响,拍摄的图片亮度差别会比较大,这无疑加大了对算法的要求。另外相机基线(两个摄像头间距)限制了测量范围,测量范围和基线关系很大:基线越大,测量范围越远;基线越小,测量范围越近。
双目视觉优劣势决定了它更适合于制造现场的在线、产品检测和质量控制。当然也有一些产品也会用此技术原理,如基于slam算法导航定位的终端产品、体感摄像头等。
2、TOF(全称:Time Of Flight)飞行时间法成像技术,它的原理是通过给目标物连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行时间来得到目标物距离。
TOF的核心部件是光源和感光接收模块,它不需要类似双目视觉算法来计算,通过特定的公式即可直接输出物体的深度信息,因而具有响应快、软件简单、识别距离远的特点,而且由于不需要进行灰度图像的获取与分析,因此不受外界光源物体表面性质影响,不过TOF技术的缺点是,分辨率低、不能精密成像。
这就决定了TOF技术更适合远距离的3D信息采集,我们最常见的就是自动驾驶领域的激光雷达,但由于自动驾驶行业的发展特点,从而导致在该领域的激光雷达公司并不多,市场份额都已被头部企业占领,后入者的市场门槛就因此变得很高。近几年来,随着To C市场扫地机器人市场份额的不断壮大,很多企业都在考虑运用TOF技术进入该领域,在这里分得一杯羹。但摆在以TOF技术企业眼前最主要的问题是如何降低成本,我们拭目以待。
3、由于双目和TOF都有各自的缺点,所以就有了第三种方式——结构光技术,它通过一个光源投射出一束结构光,打到想要测量的物体上,因为不同的物体有不同的形状,这就会因一些条纹或斑点发生不同的变形,有这样的变形之后,就需要通过算法可以计算出距离、形状、尺寸等信息,从而获得物体的三维图像。
结构光技术,既不需要用很精准的时间延时来测量,又解决了双目中匹配算法的复杂度和鲁棒性问题,所以具有计算简单、测量精度较高的优势,而且对于弱光环境、无明显纹理和形状变化的表面,同样都可进行精密测量,所以越来越多的行业应用采用结构光技术。最为常见的就是手机的面部识别。
4、激光三角测距技术,也是一种几何测量方法,本质上讲,是在利用物体之间的三角几何关系进行测距。一个典型应用就是利用激光作为光源的测量方案,它也是基于光学几何原理,根据光源、物体和检测器三者之间的几何成像关系,来确定空间物体各点的三维坐标。
这种方法通常用激光作为光源,用CCD/CMOS相机作为检测器,具有结构光3D视觉的优点精准、快速、成本低的优点。根据几何原理计算,被测物体越近,在CCD /CMOS上的位置差别就越大,分辨率和精度就越高,所以这种测量法在中近距离下的精度很高,特别适合中近距离测距,所以成为了室内机器人测距定位的首选方案。
二、外观检查
外观检查是通过图像处理技术来完成的,图像处理其实是计算机对图像信息进行处理。
对图像进行处理的主要目的有三个方面:提高图像的视感质量、提取图像中所包含的某些特征或特殊信息、图像数据的变换、编码和压缩,以便于图像的存储和传输。而这些正是生产线上检查产品是否存在质量问题最好的应用,这个环节也是取代劳动力最重要的部分。
除此,它还在其它的一些领域有应用,如生成原图的预览图、在小车或无人飞行器上装载摄像头,利用图像处理技术处理摄像头拍摄的画面。
三、识别
识别,从字面上就可以看出,这是一个认识加辨别的过程,需要机器有类人的判断。因此识别主要是通过图像处理和深度学习的融合来实现这个功能。
图像处理把外部物体信息转换成机器语言,然后过视觉感知来完成信息的输入,这一过程实质就是机器学习的过程,两者叠加融合,从而使得识别功能变得智能。最为常见的应用就是人脸识别和无人驾驶。
四、高精度检测
高精度检测其实和第一个导航定位功能原理相同,不同的是,它可能会把多个测量技术融合在一起,形成高精度的检测系统。
因为运用到高精度检测的行业一般都是在精密加工型产业与高端工业制造领域等高要求的行业,检测精度要求达到um级,这些都是人眼无法检测到,必须用机器完成的。而这也成为了工业4.0时代,工业自动化的关键应用。
人工智能和中国制造2025战略的深入下行,势必带来机器视觉需求的不断提升。
机器视觉属于技术密集型行业,核心技术的积累和持续的技术创新是企业取得竞争优势的关键因素之一,我们期待行业有更多的优秀者出现,一起为整个行业的发展添砖加瓦。
 智汇+首页
智汇+首页