特殊对位应用主要是针对特殊工艺的产品定制开发的针对性应用流程。
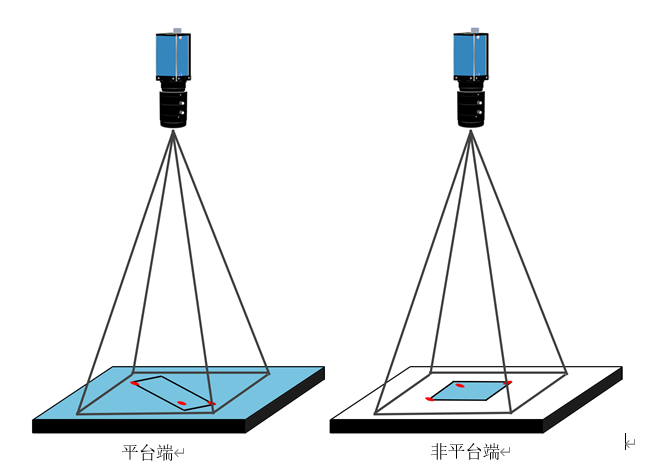
本文的示意图中,平台端都在左侧,非平台端都在右侧,特殊情况以标示为准(生产情况不一定)。
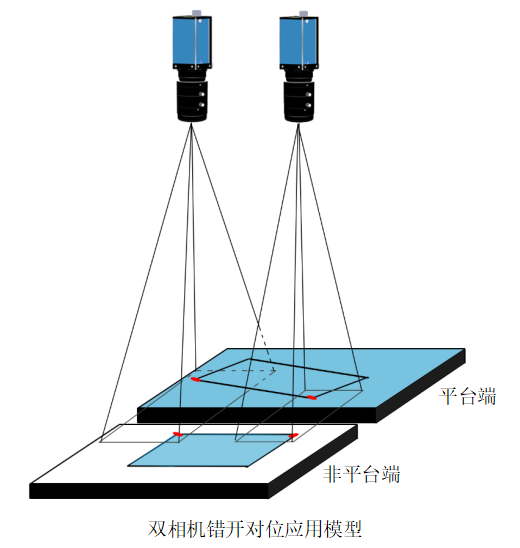
1.双/三/四相机错开对位应用
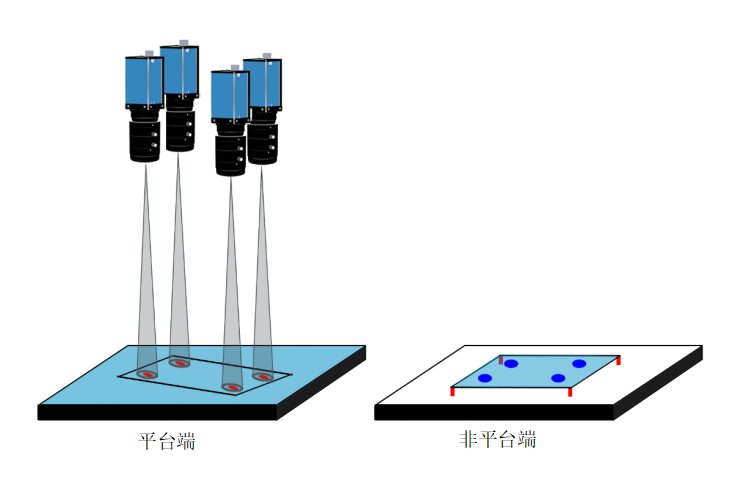
系统中可以使用两个,三个或四个相机,每个相机都可以同时看到平台端和非平台端的对应Mark点(可以通过移动对位平台,使得Mark点之间有一定的间隔,可以避免Mark点之间干涉)。
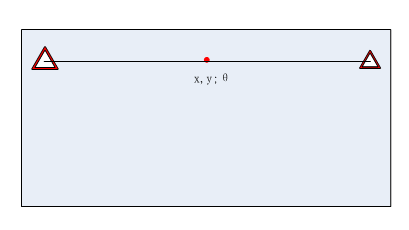
该模型下常见的Mark标志方法如下(以双相机错开对位模型Mark为例):
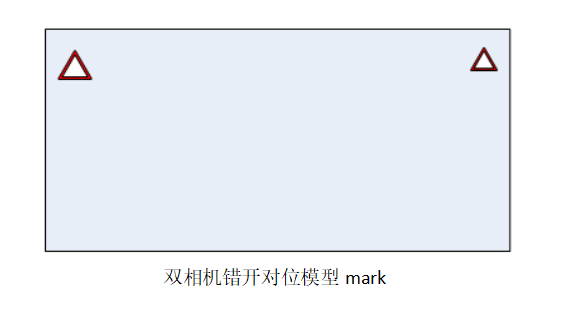
说明:如上图所示,以双相机错开对位模型为例。错开对位模型近似于映射对位模型。相同点是平台端和非平台端的产品都是不固定的,区别是映射对位需要平台端和非平台端各有一组相机,两组相机通过映射关联起来,错开对位模型中,每个相机都能同时拍摄到平台端和非平台端产品的相应Mark点。得到Mark点后。根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
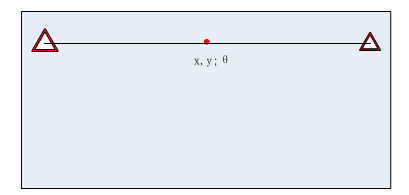
纠偏方法:如上图所示,以双相机错开对位为例,纠偏方法同四Mark映射对位。以两个Mark连线的角度作为θ,两Mark的中间点坐标作为(x,y);同样道理,三相机错开对位纠偏方法同六Mark映射对位;四相机错开对位映射方法同8相机映射对位。
应用场景:这种对位模型原理上与映射对位相似,但是不需要相机映射,精度可以达到更高。常用在邦定机设备上。除邦定机外,大部分设备受安装空间等原因限制,不能做到一个相机拍摄到两个产品的Mark,不能使用这种模型。
适用产品:结构上能实现拍摄要求的产品
适用尺寸:小尺寸
精度:±0.02mm
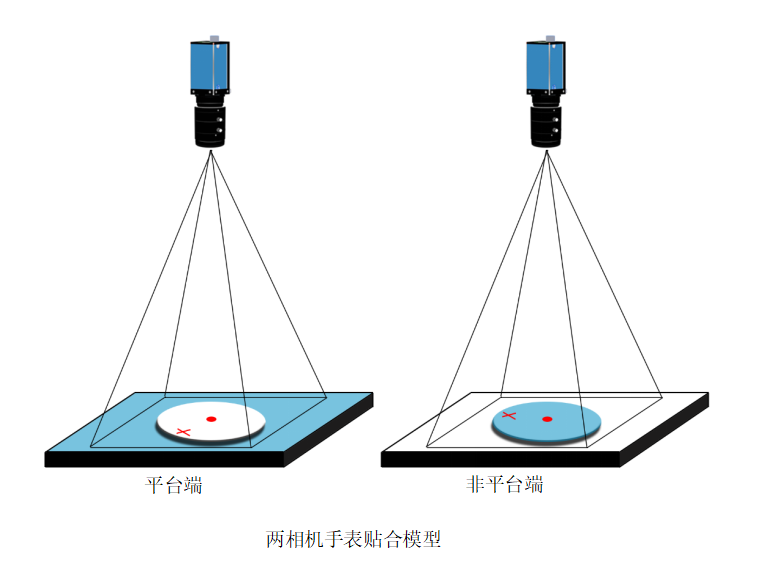
2.两相机手表贴合应用
针对圆形手表应用,系统中有两个相机,定位方式:1.圆心定XY+圆心上的Mark定角度;2.圆心定XY+圆上的弦定角度。(需要建立映射关系)
该模型下常见的Mark标志方法如下(以圆心定XY+圆心上的Mark定角度为例):
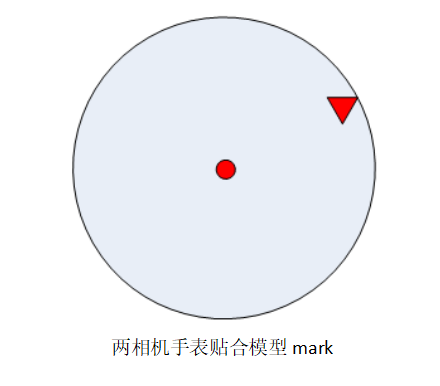
说明:如上图所示,两相机手表贴合模型是专门针对圆形产品的应用。类似于四Mark映射对位模型。相同点是平台端和非平台端的产品都是不固定的,都是通过四个Mark点定位。区别是四Mark映射对位是针对矩形产品,两相机手表贴合模型专门针对圆形产品。得到Mark点后。根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
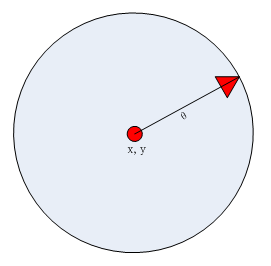
纠偏方法:如上图所示,以圆心定XY+圆心上的Mark定角度为例。拟合圆找到圆心最为(x,y),圆心与特征Mark之间的连线角度为θ。
适用产品:专用于圆形产品贴合,例如圆形手表
适用尺寸:小尺寸
精度:±0.05mm
3.Fast双Mark自对位应用
根据客户要求,参考法视特对位软件做的应用,目前不用。
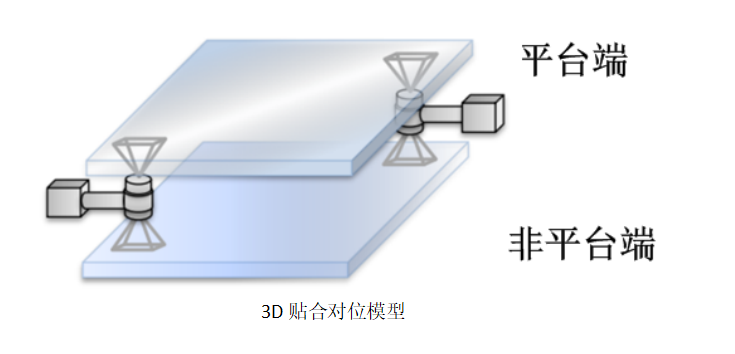
4.3D贴合对位应用
专门针对手机玻璃3D膜片贴付。
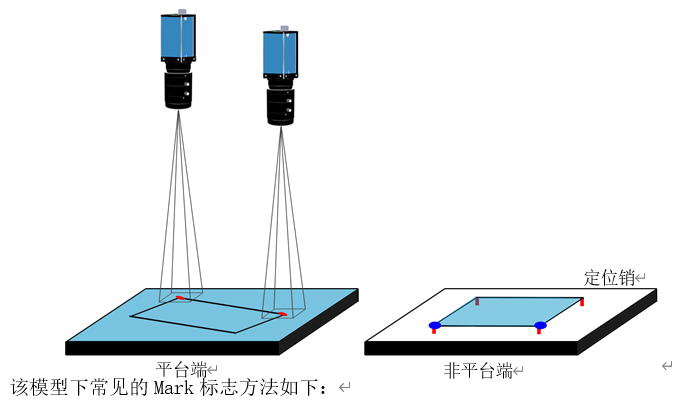
该模型下常见的Mark标志方法如下(类似错开对位)
说明:如上图所示,3D贴合对位有几种固定的抓Mark方法。上图的所示方法与双相机错开对位相似。平台端和非平台端的产品都是不固定的,每个相机通过棱镜镜头,能同时拍摄到平台端和非平台端产品的相应Mark点。得到Mark点后。根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
纠偏方法:如上图所示,3D贴合对位模型有几种固定的抓Mark方法。以上图的方法为例。以两个Mark连线的角度作为θ,两Mark的中间点坐标作为(x,y)。
应用场景:适用于精度要求较高的项目,如3D贴合
适用产品:玻璃+拉丝模(3D贴合)
适用尺寸:小尺寸
精度:±0.02mm
5.双Mark热熔机叠板应用
针对PCB叠板热熔应用,系统中有两个相机,定位原理方式与“双相机自对位”类似,目标位置ORG的坐标为相机中心坐标,以及设置每层板的Mark 圆的 直径值、容差、膨胀等功能,抓取图像方式上同时适应抓取大小不一的圆Mark。
6.丝印机四个圆定飞拍
定位方式与四Mark自对位应用基本相同,系统一个相机,四通道抓取四个圆心来定位XYR。
该模型下常见的Mark标志方法如下(类似四Mark自对位):
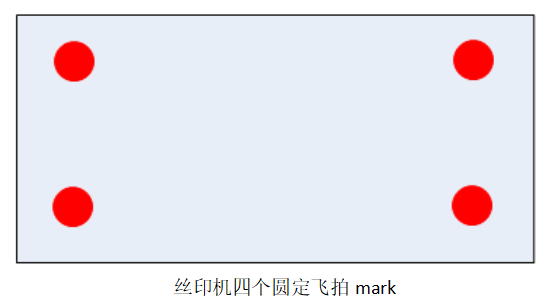
说明:非平台端上的产品通过定位销或其他方式确保来料都是在相对固定的位置,平台端的产品来料位置不固定,找出四个交点后,根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。

纠偏方法:如上图所示,类似单目四Mark,区别在于单目四Mark是以矩形角点作为Mark点,丝印机四个圆定飞拍是以圆心作为Mark点。
应用场景:丝印机
适用产品:较大产品
适用尺寸:>200mm
精度:±0.05mm
 智汇+首页
智汇+首页


















 2681
2681
