智汇+首页
智汇+首页










进入店铺
哈工大机器人系统(佛山)有限公司



 应用方式:其他应用
应用方式:其他应用
 应用行业:其他
应用行业:其他
 案例地址:江苏省南京市江宁区
案例地址:江苏省南京市江宁区
 发布时间:2020-06-26
发布时间:2020-06-26
价格:面议
收藏
 4281
4281
立即雇佣他
合作企业:
南京康特
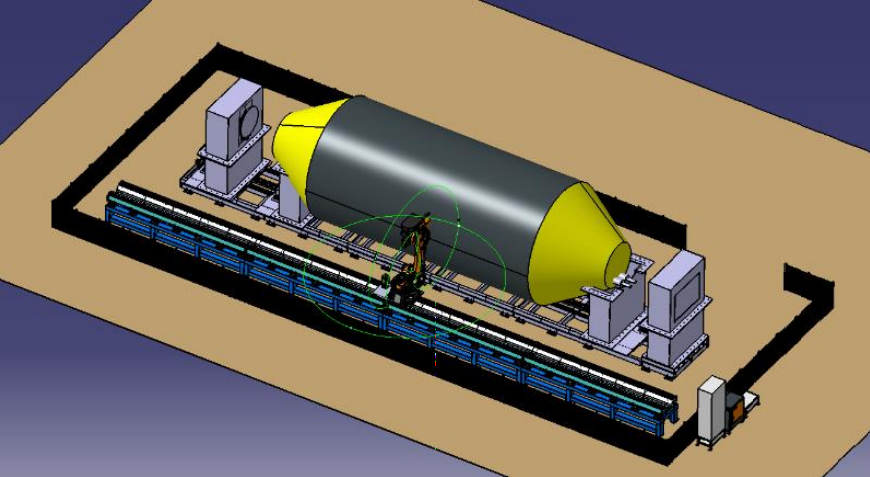
项目介绍:
本套系统包括KUKA KR210、20m机器人外部轴移动导轨、10T翻转变位机、离线编程等,实现机器人多轴联动功能。
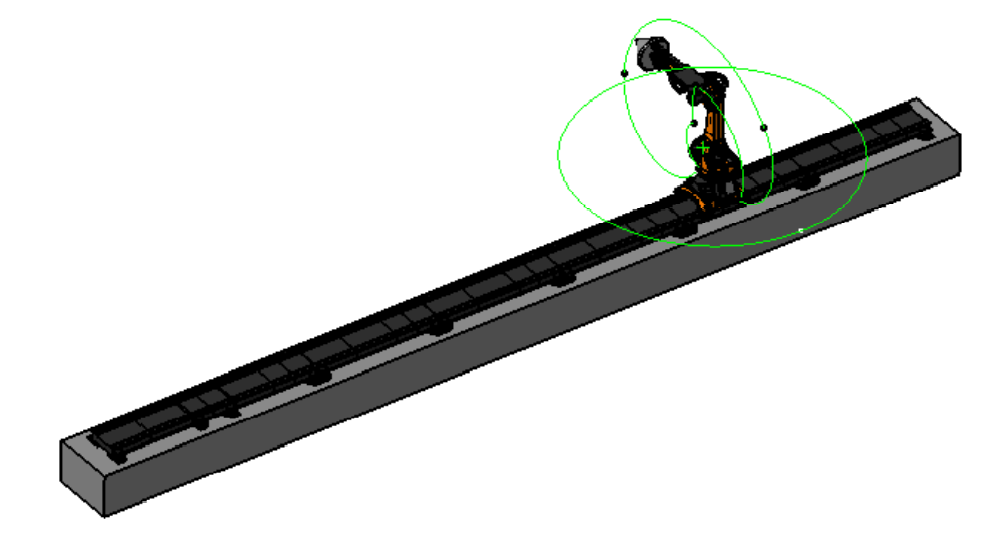
导轨介绍:
1、采用KUKA伺服电机驱动,与KUKA机器人联动控制;
2、为保证机器人的可达性,机器人导轨需要架高1000mm;
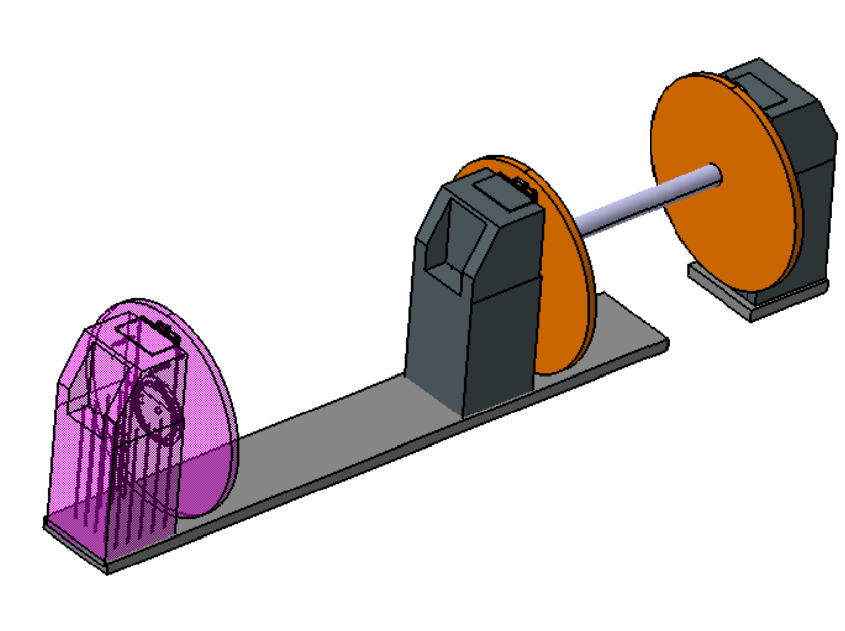
10T变位机介绍:
1、采用KUKA伺服电机驱动,与KUKA机器人联动控制;
2、变位机尾座可自动调整,伺服电机驱动;
3、两端带三抓卡盘用于固定工件(根据工件外形定制);
4、采用日本帝人RV减速机,保证变位机精度及稳定性;