 智汇+首页
智汇+首页










进入店铺
广工大研究院技术研发部



 应用方式:检测应用
应用方式:检测应用
 应用行业:其他
应用行业:其他
 案例地址:广东省佛山市南海区
案例地址:广东省佛山市南海区
 发布时间:2024-05-27
发布时间:2024-05-27
价格:面议
收藏
 1648
1648
立即雇佣他
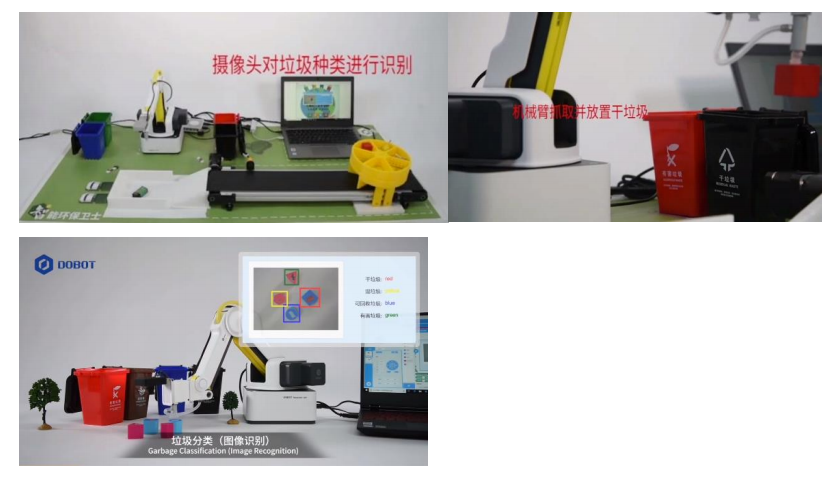
采用机械臂、控制盒、摄像头、场景包等设备,搭建模拟智能垃圾分类场景,搭建一个小型智能垃圾分类系统,将印有垃圾的图片放置于摄像头的识别区域,机器人通过图像识别技术对垃圾类型进行识别判断,图片识别完成后,程序将控制机械臂自动将垃圾卡片分拣到对应的垃圾箱内,完成垃圾自动分类的任务。
