 智汇+首页
智汇+首页










进入店铺
哈工大机器人系统(佛山)有限公司



 应用方式:搬运应用
应用方式:搬运应用
 应用行业:机械装备
应用行业:机械装备
 案例地址:安徽省马鞍山市雨山区
案例地址:安徽省马鞍山市雨山区
 发布时间:2020-06-26
发布时间:2020-06-26
价格:面议
收藏
 4360
4360
立即雇佣他
项目背景:
目前内齿圈淬火采用天车调运,人工挂钩方式进行上下料调运。需俩个人配合才能完成。浪费劳动力、节拍时间长。现需一套机器人自动上下料系统,自动完成内齿圈淬火上下料、自动码垛,实现不间断连续生产。
现场人工实施

项目介绍:
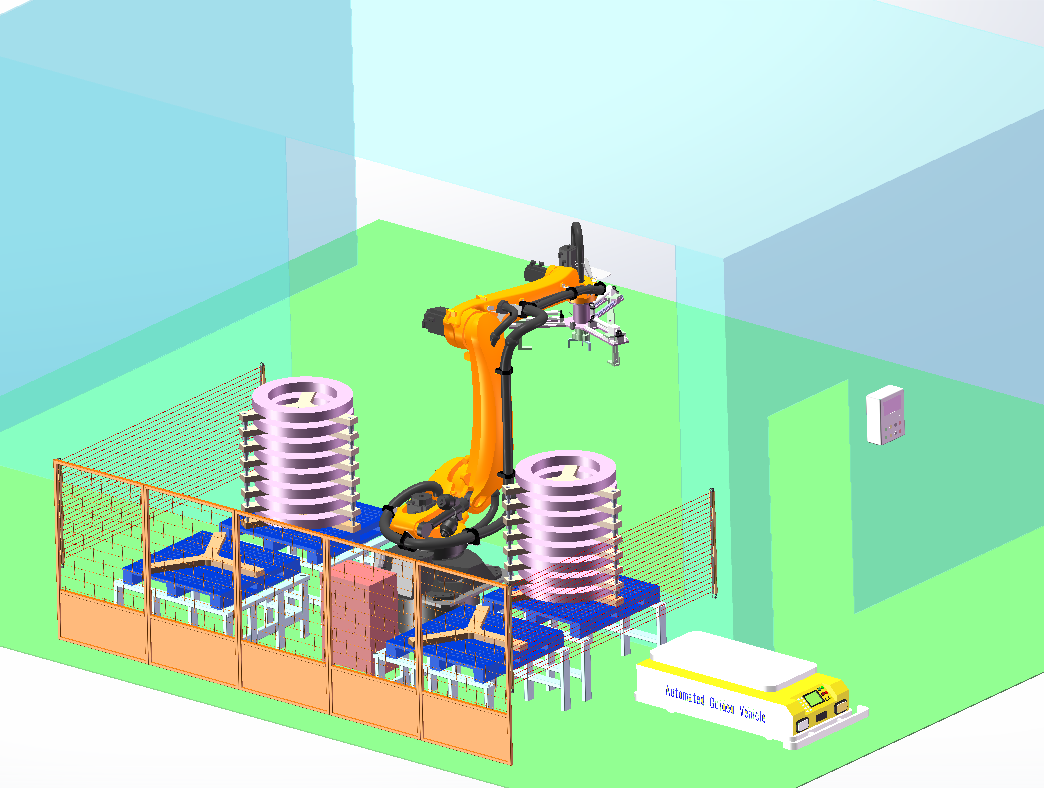
系统由KUKA机器人KR210、抓手、二次定位台等设备组成。
设计亮点:
1、取消视觉系统识别,采用对中平台对齿轮圈进行二次定位;
2、抓手通过超声波检测,与夹具三爪卡盘错位识别,避免碰撞;
工作站示意图
实施效果:
项目改造前:人工通过横吊转挂内齿圈至加工位置,工作环境温度高,存在水雾,视觉系统满足不了要求;
项目改造后:机器人实现自动取放齿轮圈及隔板,抓手可适应客户多款产品;采用对中台对齿轮圈进行二次定位降低客户投入成本;通过超声波传感器检测,机器人抓手与三爪卡盘错位识别,避免碰撞风险;

