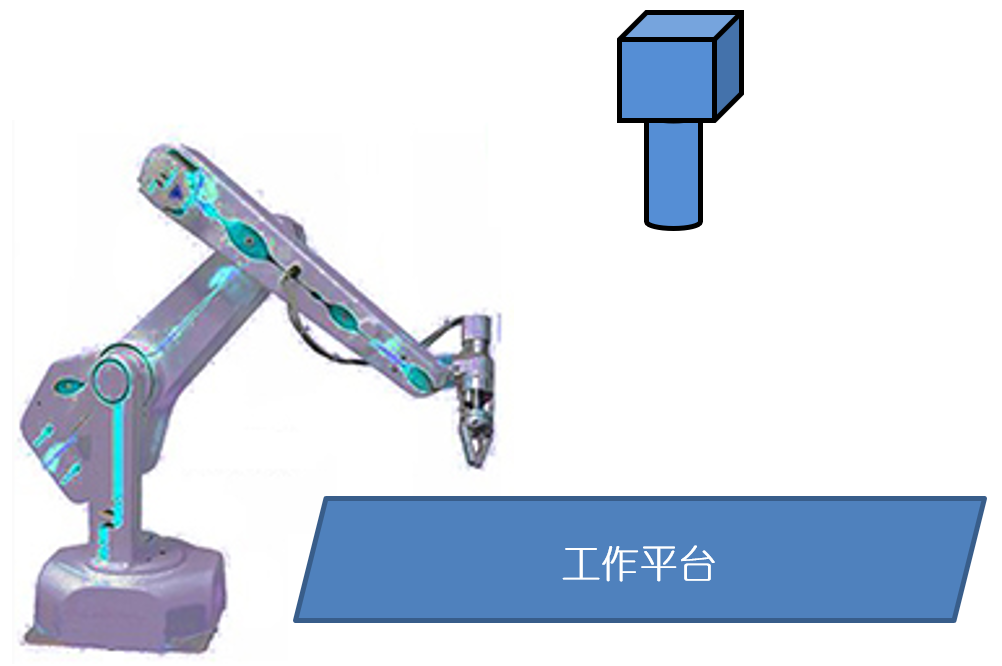
1.大视野抓取
系统中可以使用1颗相机,一般相机静止在产品上方,看大视野引导机械手抓取产品
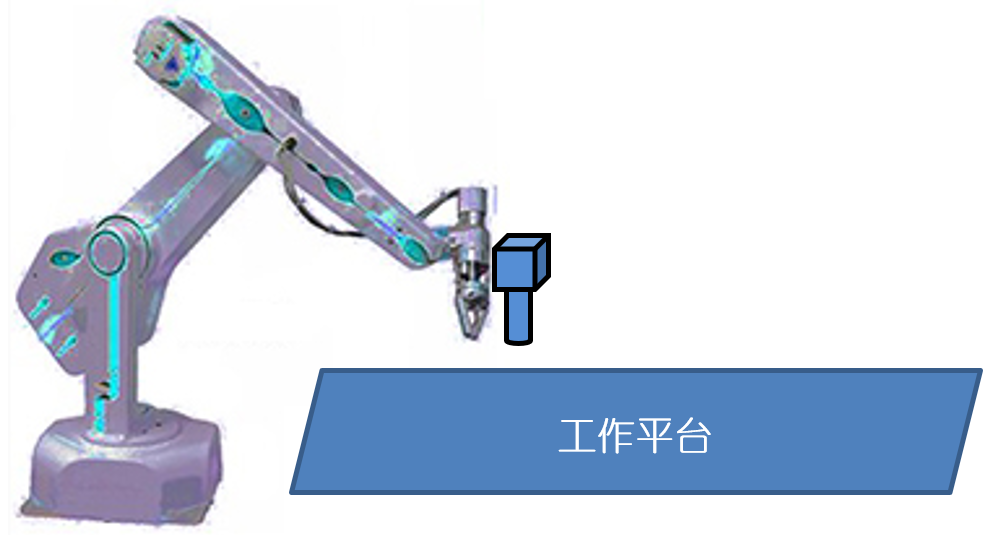
2.小视野抓取
系统中可以使用1颗相机,一般相机固定在机械手上(通常要固定在第4轴或者第6轴上),通过移动拍摄产品几个位置来进行定位组装
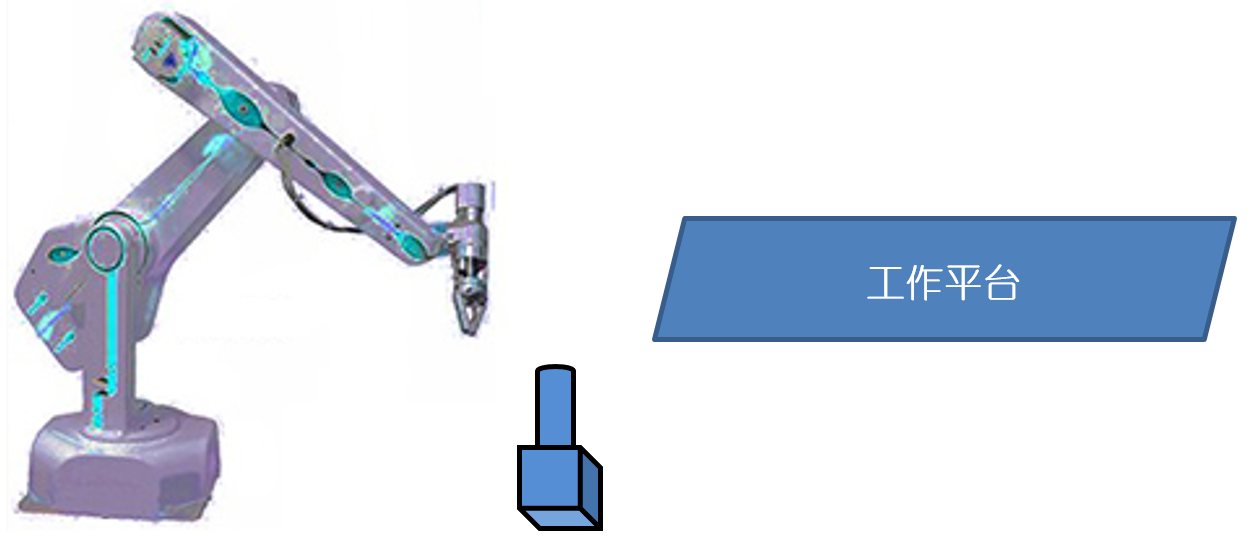
3.精定位
系统中可以使用1颗相机,一般相机固定,拍摄机械手上抓取得产品进行精对位调整
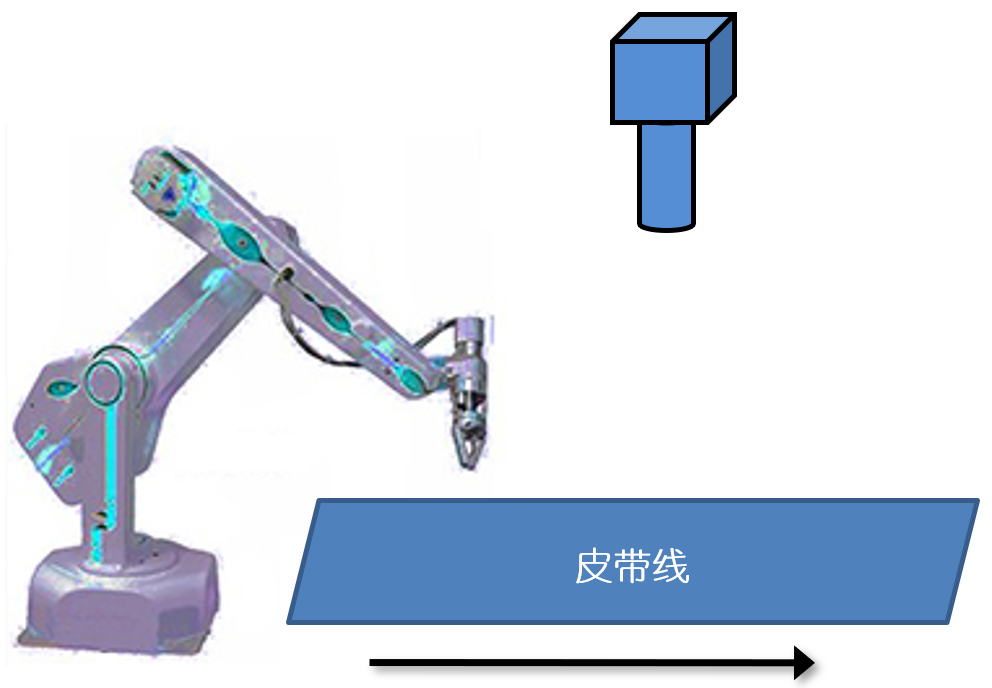
4.皮带线抓取
系统中可以使用1颗相机,一般相机固定,拍摄运动中皮带线上产品,引导机器人跟踪抓取
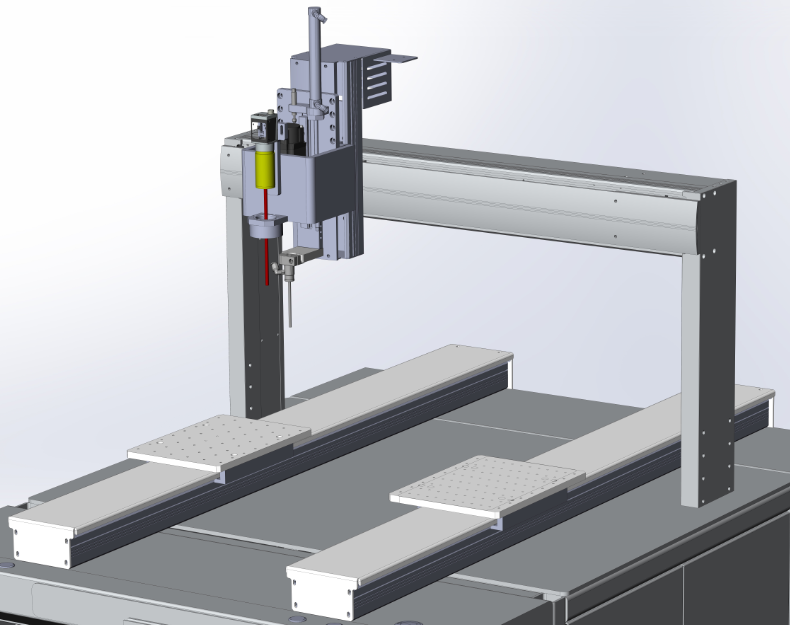
5.定位打螺丝
系统中可以使用1颗相机,一般相机固定XZ轴上,通过拍摄产品定位孔阵列出其他锁螺丝位置。或者逐个拍摄所有螺丝孔位给出锁螺丝位置
 智汇+首页
智汇+首页

















 2616
2616
