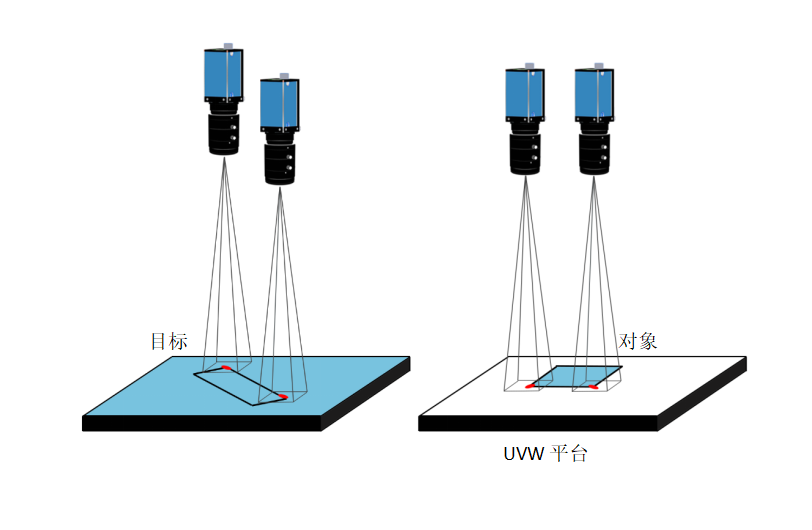
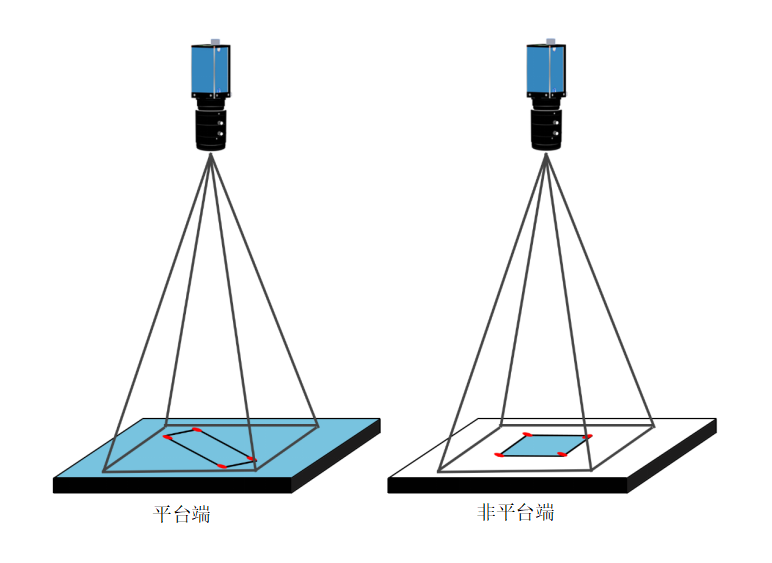
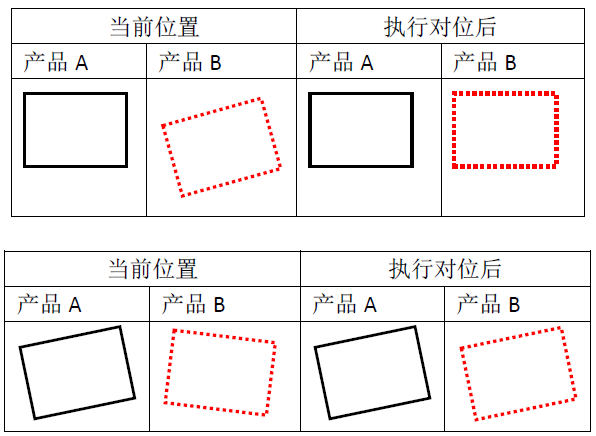
映射对位应用①目标产品和对象产品放置到视野中,放置目标产品的平台称为非对位平台,放置对象产品的平台称对位平台;②视觉系统拍摄两个产品对应的靶标,计算对象产品和目标产品的位置偏差;③操控对位平台机构执行偏差纠偏直到偏差小于设定值;④完成纠偏后,再执行设备下一步动作。主要应用领域有3C产品贴合组装、机械手组装,汽车制造等。
对位目标不固定,通过非对位平台上的目标相机获取坐标,通过映射关系转换到平台上相机中,再计算出对象和目标位置偏差,使对准目标位置。

1.单目双Mark映射对位模型
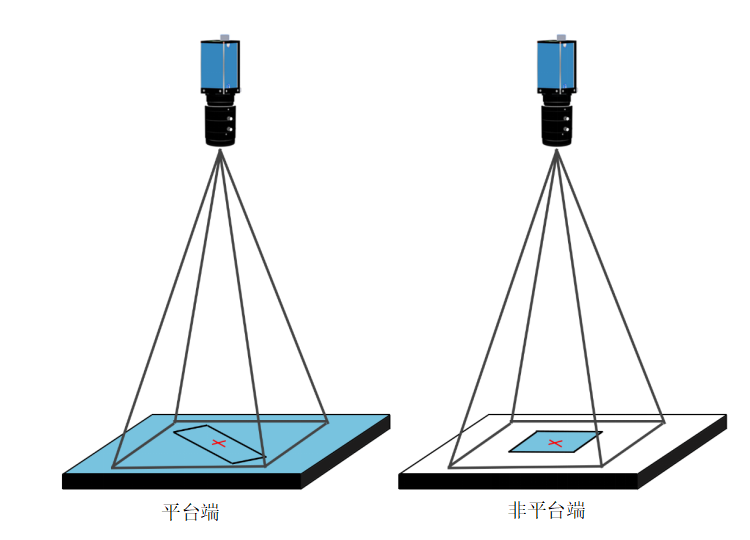
说明:平台端和非平台端来料位置都不固定,但是Mark与产品的相对位置固定。平台端和非平台端各有一个相机,拍照并找两张照片中Mark的角度坐标差作为偏移量,根据偏移量和两相机之间的映射关系,将平台端的产品贴到非平台端上。
应用场景:小尺寸产品或精度要求不高的产品
适用产品:如fpc与钢片的贴合
适用尺寸:小尺寸
精度:±0.05mm
2.单目四Mark映射对位模型
该模型下常见的Mark标志方法如下(同单目双Mark自对位):

说明:平台端和非平台端来料位置都不固定,但是Mark与产品的相对位置固定。确保两个Mark都在相机视野内(通常是将产品抓起后再拍摄防止拍完再抓导致产品移动或变形)。根据纠偏算法找到偏移量。根据偏移量和两端相机的映射关系将平台端的产品贴到非平台端上。

纠偏方法:如上图所示,纠偏方法同单目双Mark自对位,区别在于单目双Mark自对位是将平台端产品贴合到基准位,单目四Mark映射对位模型是将平台端产品贴合到非平台端,两端的产品都需要做定位。
应用场景:相同环境下单目四Mark映射对位比单目双Mark映射对位精度高
适用尺寸:小尺寸
精度:通常±0.05mm
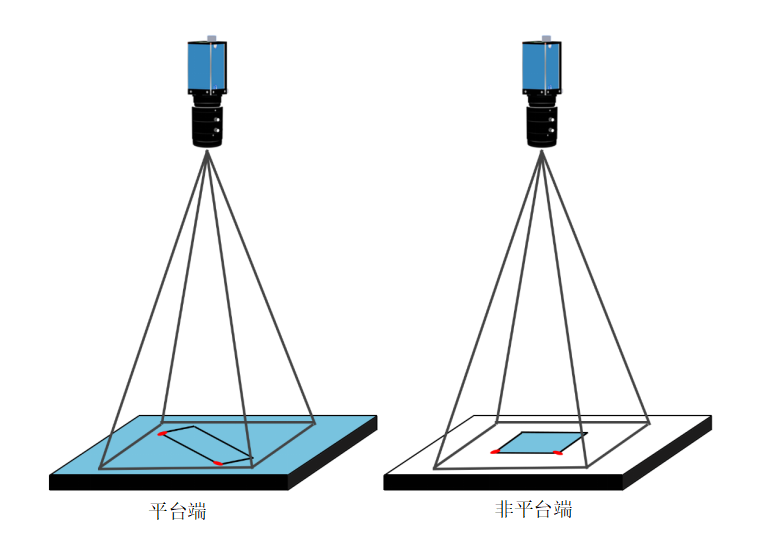
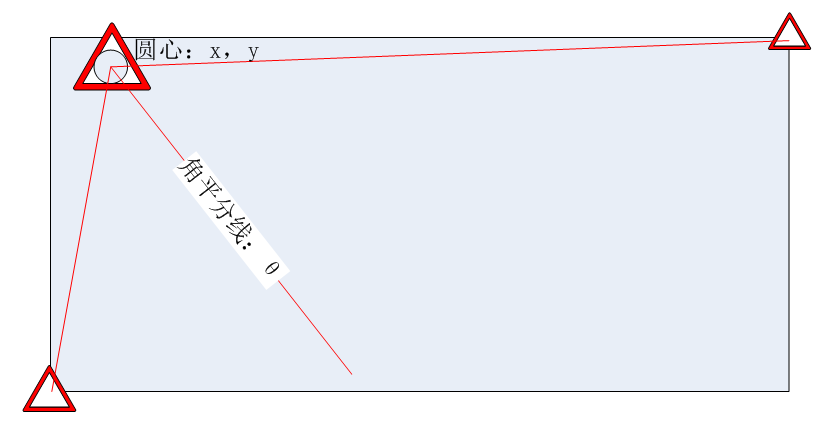
3.单目六Mark映射对位模型
该模型下常见的Mark标志方法如下(同单目三Mark自对位):
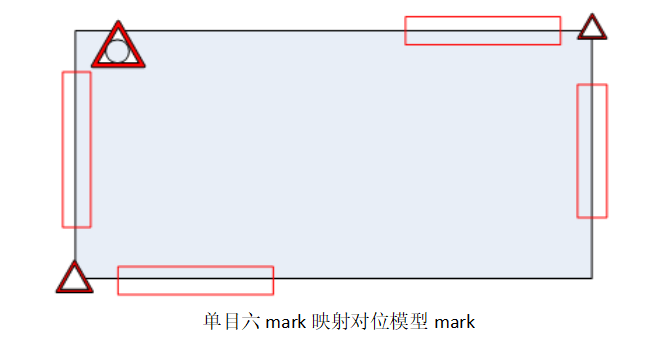
说明:平台端与非平台端的产品来料位置不固定,但是Mark与产品的相对位置固定。三个Mark对应产品的两个交点和一个特征点。拍摄时确保所有Mark点在相机视野内(通常是将产品抓起后再拍摄防止拍完再抓导致产品移动或变形)。根据纠偏算法找到偏移量,根据偏移量将平台端的产品贴到非平台端上。
纠偏方法:如上图所示,纠偏方法同单目三Mark自对位,区别在于单目三Mark自对位是将平台端产品贴合到基准位,单目六Mark映射对位模型是将平台端产品贴合到非平台端,两端的产品都需要做定位。
应用场景:该模型并不常用,属于比较特殊的应用模型,但是相同环境下精度比单目单/双Mark更高
适用产品:客户要求使用这种定位方式时
适用尺寸:小尺寸
精度:±0.05mm
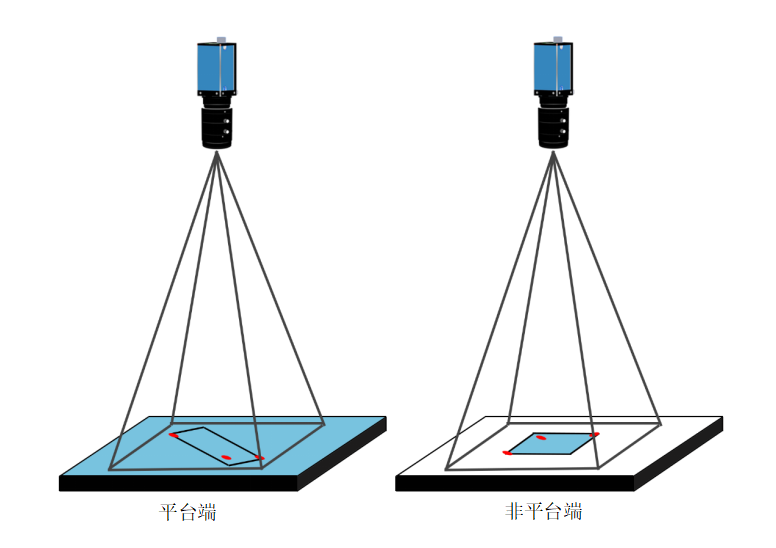
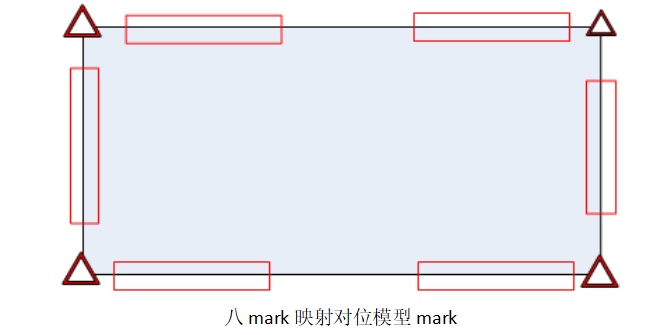
4.单目八Mark映射对位模型
该模型下常见的Mark标志方法如下(同单目四Mark自对位):
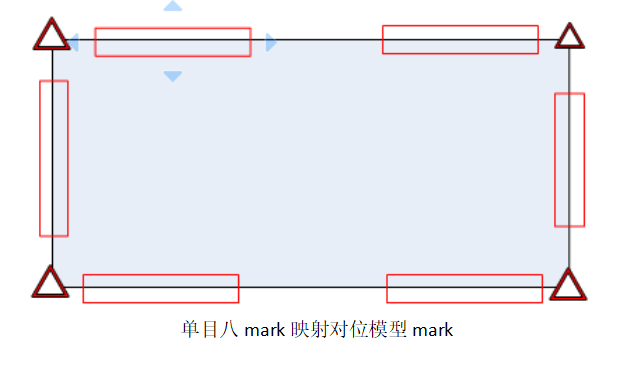
说明:平台端和非平台端来料位置都不固定,但Mark与产品的相对位置固定。四个Mark对应矩形产品的四个角点。拍摄时确保四个Mark都在相机视野内(通常是将产品抓起后再拍摄防止拍完再抓导致产品移动或变形)。根据纠偏算法找到偏移量。根据偏移量和两端相机的映射关系将平台端的产品贴到非平台端上。

纠偏方法:如上图所示,纠偏方法同单目四Mark自对位,区别在于单目四Mark自对位是将平台端产品贴合到基准位,单目八Mark映射对位模型是将平台端产品贴合到非平台端,两端的产品都需要做定位。
应用场景:增加了抓取Mark通道,使得对位精度更高,对产品的居中效果更加明显
适用产品:客户要求精度较高时
适用尺寸:800x600mm(完成项目)
精度:±0.05mm
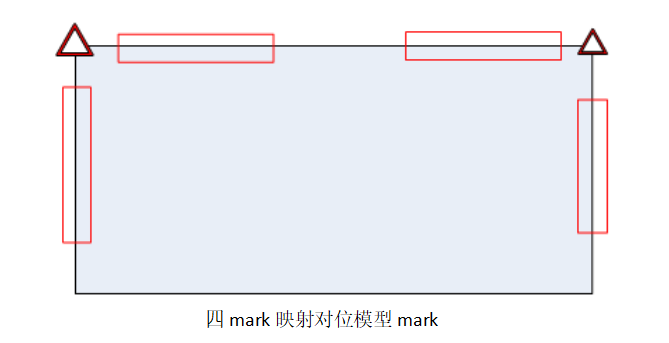
5.四Mark映射对位模型
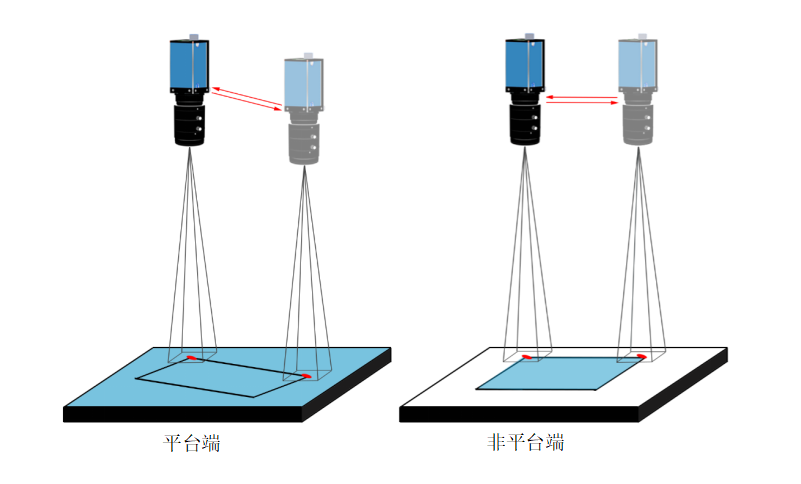
四mark映射对位模型(1)---单相机模型,如下图:
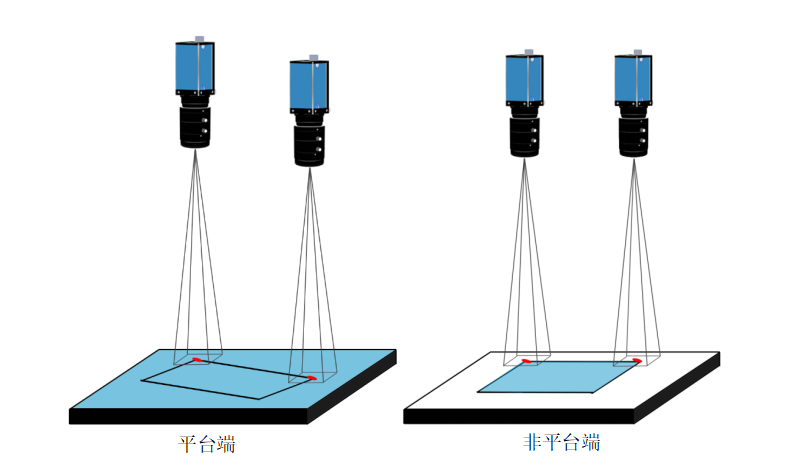
四mark映射对位模型(2)---双相机模型,如下图:
该模型下常见的Mark标志方法如下(同双Mark自对位):
说明:四Mark映射对位有单相机和双相机两种情况(平台端)。单相机模型拍摄完一个Mark点后移动位置拍摄另一个Mark点,双相机模型两个相机分别拍摄两个交点。非平台端与平台端拍摄方式相同。得到Mark点后。根据纠偏算法找到偏移量,根据偏移量和两组相机的映射关系将平台端的产品贴到非平台端上。
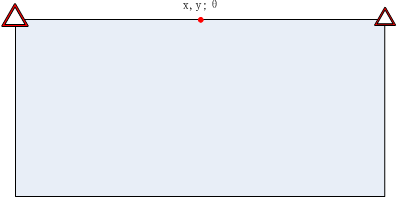
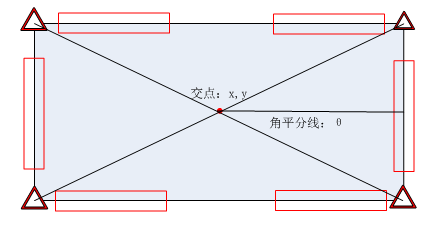
纠偏方法:如上图所示,纠偏方法同双Mark自对位,一般使用长边中点作为(x,y),长边角度作为θ。区别在于双Mark自对位只有平台端有相机,通过平台端的拍摄的Mark点和基准Mark点对比;四Mark映射对位的平台端和非平台端都有相机,通过平台端拍摄的Mark点和非平台端拍摄的Mark点对比。
应用场景:弥补单目双Mark映射对位在较大尺寸产品时精度不够的问题,相对单目双Mark映射对位精度更高
适用产品:较大产品
适用尺寸:100~200mm
精度:±0.05mm
6.六Mark映射对位模型
六mark映射对位模型(1)---单相机模型,如下图:
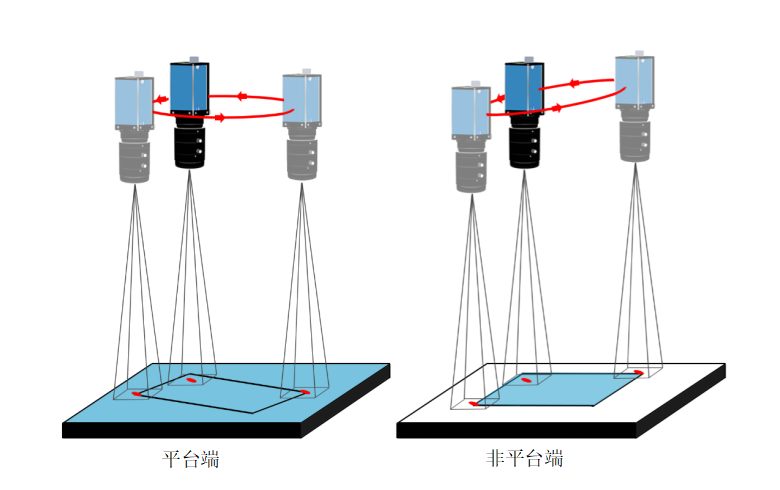
六mark映射对位模型(2)---三相机模型,如下图:

该模型下常见的Mark标志方法如下(同三Mark自对位模型):
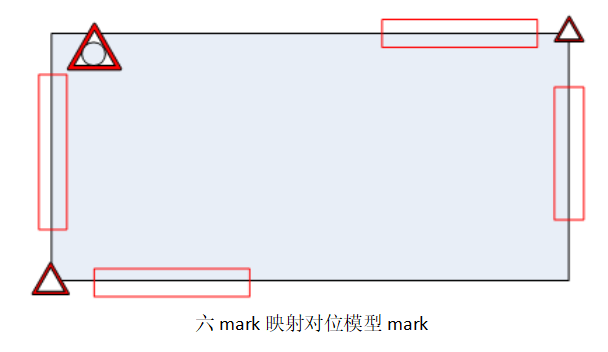
说明:六Mark映射对位有单相机和三相机两种情况(平台端)。单相机模型拍摄完一个Mark点后移动位置拍摄另一个Mark点,三相机模型三个相机分别拍摄三个Mark点。非平台端与平台端拍摄方式相同。得到Mark点后,根据纠偏算法找到偏移量,根据偏移量和两组相机的映射关系将平台端的产品贴到非平台端上。
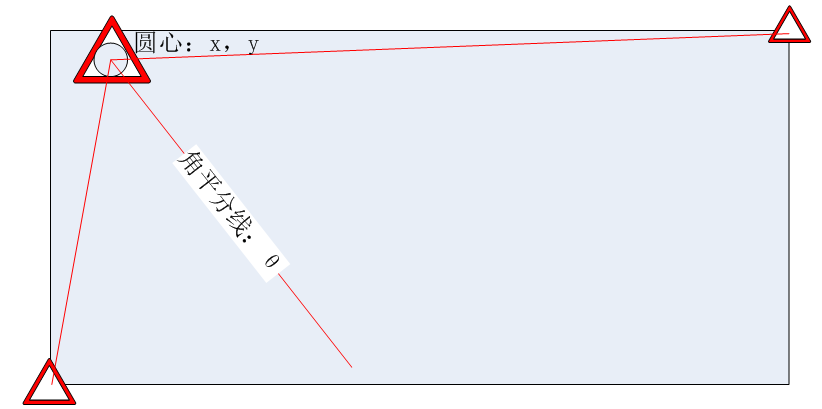
纠偏方法:如上图所示,纠偏方法同三Mark自对位。
应用场景:该模型并不常用,属于比较特殊的应用模型,但是相同环境下精度比单目单/双Mark更高
适用产品:较大产品
适用尺寸:>200mm
精度:±0.05mm
7.八Mark映射对位模型
八mark映射对位模型(1)---单相机模型,如下图:
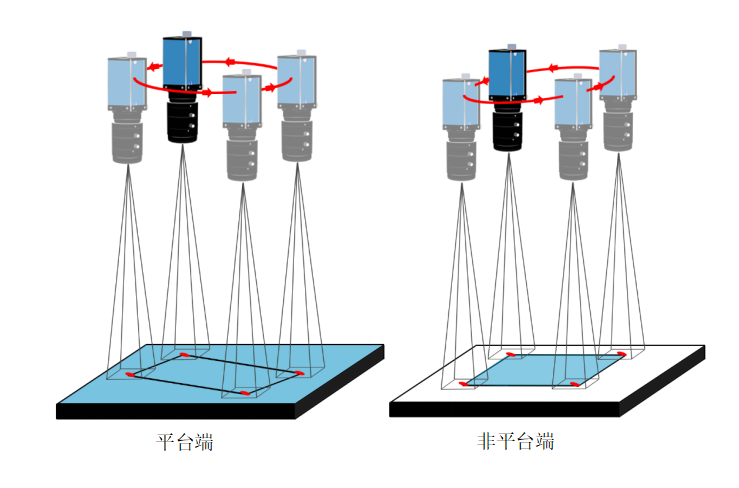
八mark映射对位模型(2)---四相机模型,如下图:
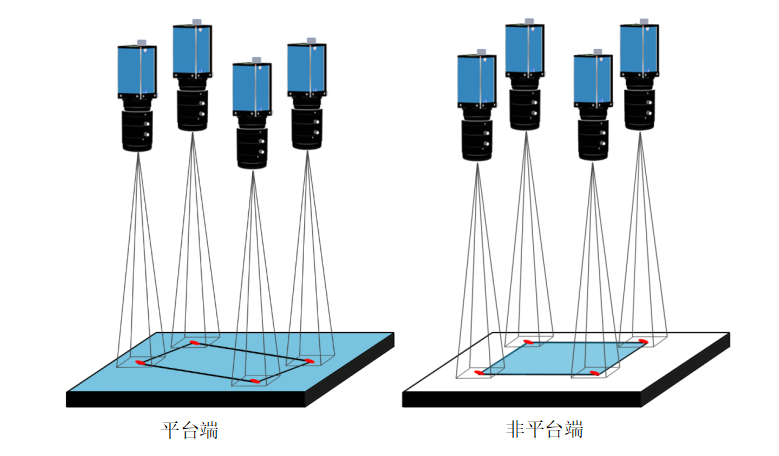
该模型下常见的Mark标志方法如下(同单目四Mark):
说明:八Mark映射对位有单相机和四相机两种情况(平台端)。单相机模型拍摄完一个Mark点后移动位置拍摄另一个Mark点,四相机模型的四个相机分别拍摄四个交点。非平台端和平台端拍摄方法相同。找出两端的Mark点后,根据纠偏算法找到偏移量,根据偏移量和两组相机的映射关系将平台端的产品贴到非平台端上。
纠偏方法:如上图所示,纠偏方法同四Mark自对位。
应用场景:用于解决产品尺寸较大,精度不够的问题。八Mark映射对位精度相比六Mark和四Mark更高
适用产品:较大尺寸产品
适用尺寸:>200mm
精度:±0.05mm
 智汇+首页
智汇+首页

















 2734
2734
